
De "Hi6sim" zweefvliegsimulator
Douwe Jippes, dč techneut van de High Five groep, is begonnen aan een zweefvliegsimulator project.
Het is de bedoeling dat dit project resulteert in een simulator op
6 poten met bewegingen in drie vlakken en drie richtingen
en projectie van de scenery.
De zes poten worden aangedreven door stofzuigermotoren. (oude Mile stozuigers (gratis))
De informatie die je hierna aantreft is van voorlopige aard; met het vorderen van het project zal de informatie worden bijgewerkt en uitgebreid.
Voor meer informatie en vragen, stuur een e-mail naar Douwe
Foto's van de laatste stand (feb 2005) staan meer naar onderen
De nieuwste foto's (nov 2007) zijn te vinden op:
MK I
De ontwikkeling van een goedkoop bewegend platform voor (zweef)vliegsimulatie.
Voorbeelden van internet:

Voorbeeld 1

Voorbeeld 2
Voorbeeld 3
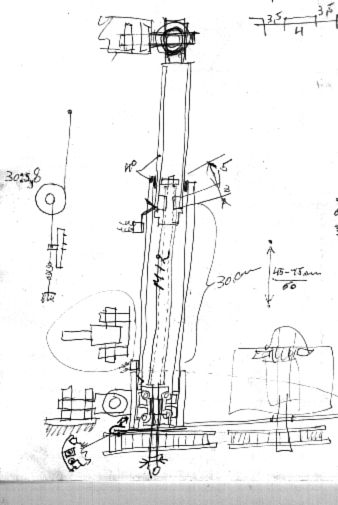
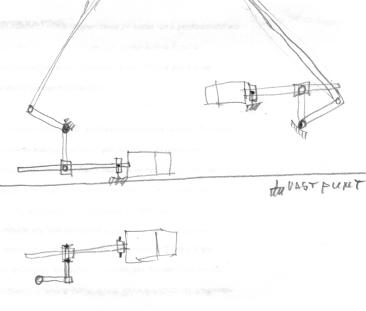
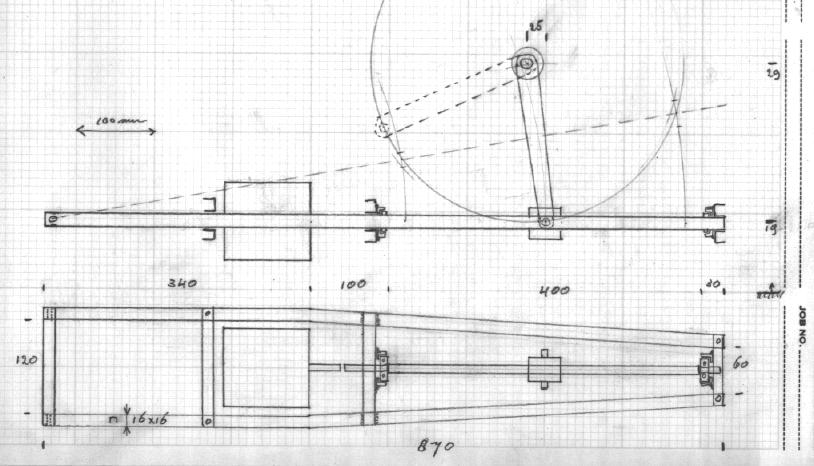
Schets van een poot
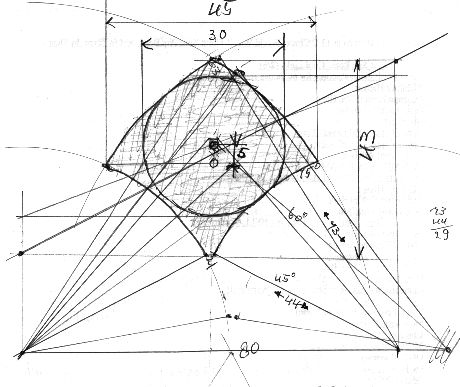
Schets van de bewegingsmogelijkheden van een hoekpunt
De koppeling tussen motor en draadeind is met een stuk hogedrukslang en slangen klemmen


De stofzuigmotor blijkt sterk en snel genoeg
Idee voor MK II
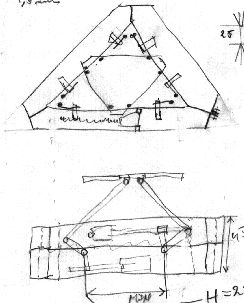
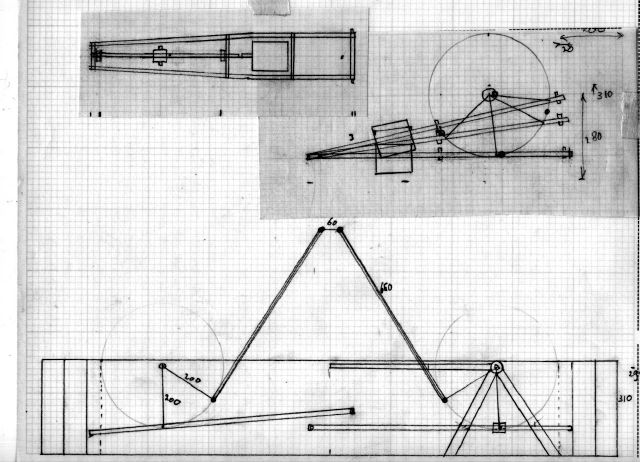
Twee motorunits in een bak
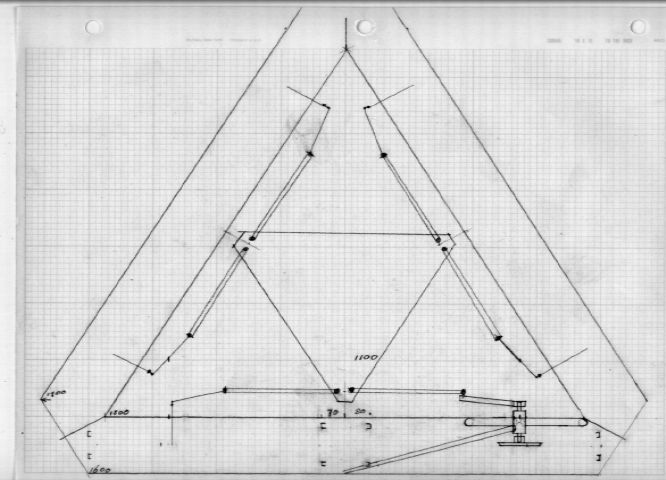
Drie bakken vormen de basis van het platform
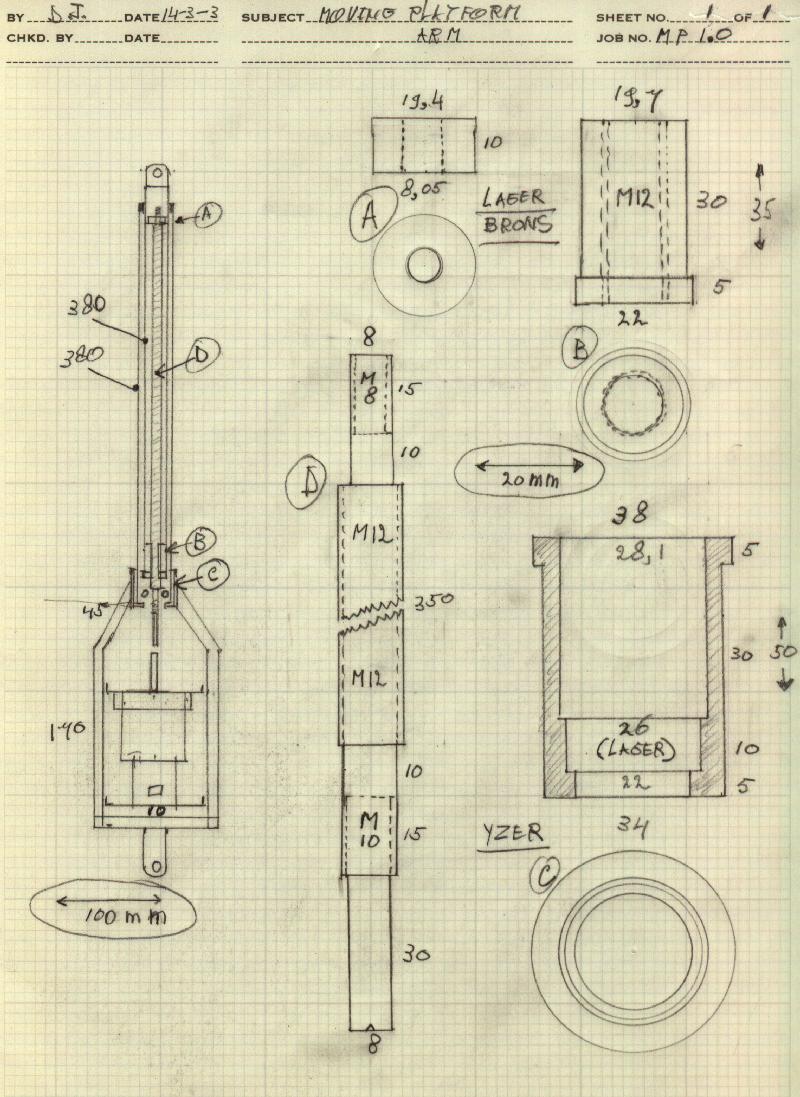
Het motorframe
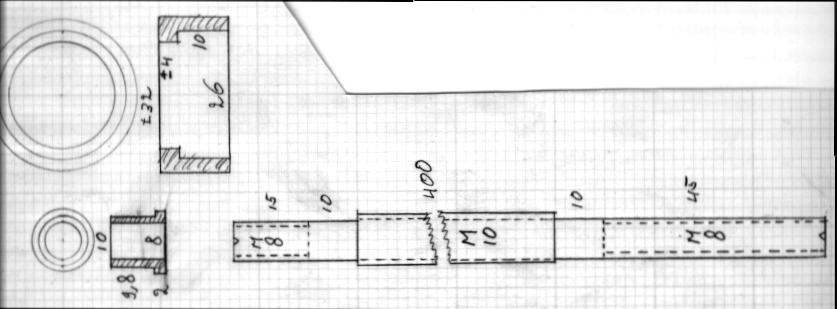
Het draadeind met lagerhouders
Montage hulpafstandsbus voor de buitenste lagerhouders
Motorframe met montagemal


Een van de motoren met draadeind

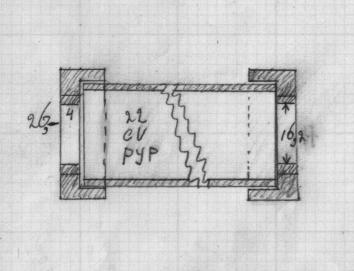
De draaipunten van de twee motorframes.
In de opgelaste moeren
komen stukjes draadeinden met een iets excentrisch afgedraaid stuk,
zodat het de baan van het frame uitgericht kan worden ten opzichte van
de arm aan het kettingwiel.
In het motorframe komen twee nylon bussen.

Van het kettingwiel moet nog het grootste deel verwijderd worden.
Aan het overblijvende stuk komt nog een verstelbare arm die aangrijpt
op de wormmoer op het draadeind.
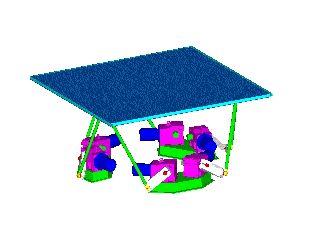
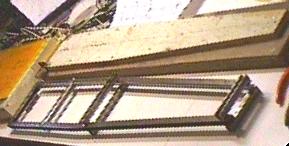
De laatste stand van de ontwikkeling (feb 2005):
Foto's van de poot in een aantal standen:

De laagste stand

De midden stand

De hoogste stand

De maximale zijdelingse uitslag
Voor vervolg zie "hi6sim"
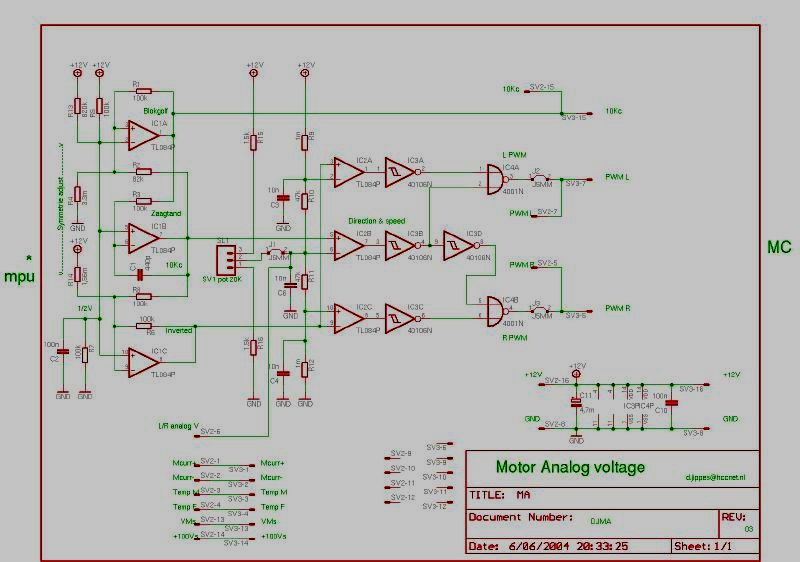
De aansturing kan:
met een potmeter van 20K. op SL1. voor test doeleinden.
Vanuit de MPU:
een spanning van 1V.(vol links) / 6V.(stop) / 11V.(vol rechts) op SV2-6,
of een pwm signaal voor links of rechts om op SV2-7 of SV2-5.
IC1 maakt een zaagtand spanning van 10Kc.
IC2,3 en 4 maken er onder invloed van de spanning op jumper J1 een links of rechts 20Kc pwm signaal van.
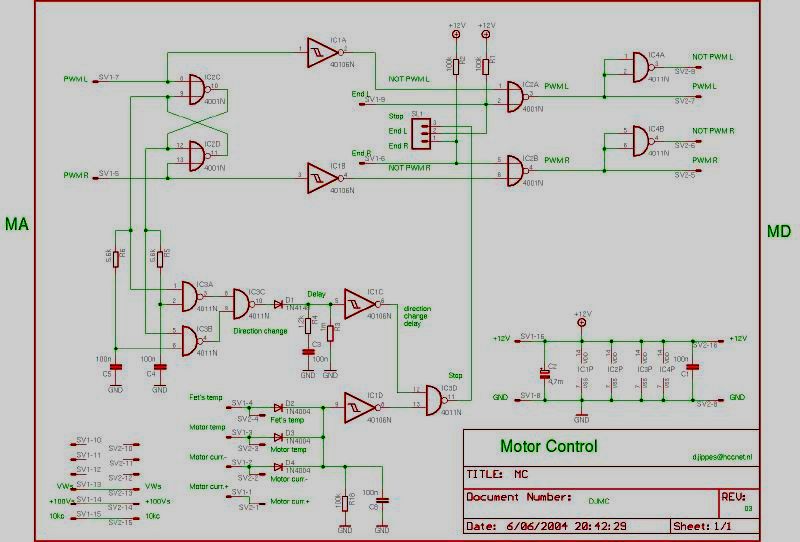
IC2C en D vormen een flipflop die omslaat bij richtinsverandering.
Uit IC1C komt dan een puls die de motor aansturing even onderbreekt.
Te hoge temperaturen en stromen kunnen via IC1D de aan sturing afschakelen.
Zo ook de eindschakelaars aangesloten op SL1.
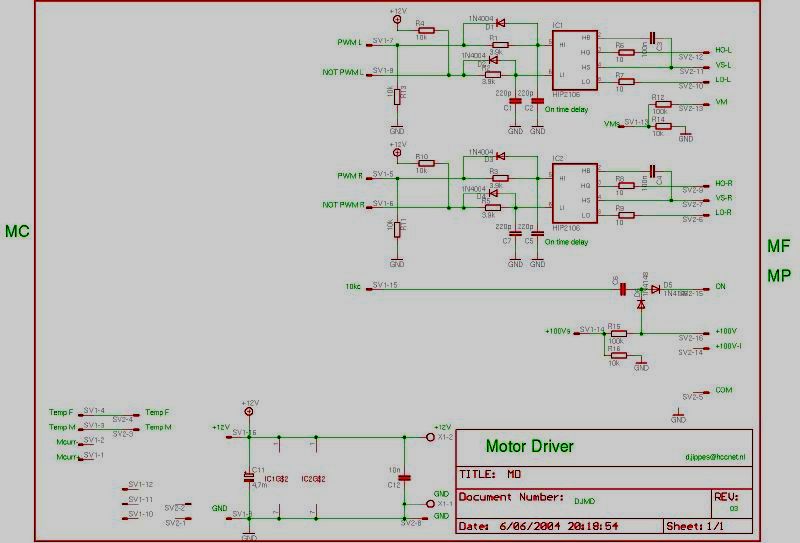
Het ingangs RC netwerk zorgt voor een inschakel vertraging om te voorkomen dat de fet aan de +100V
en die aan de -100V aan een kant van de brug tegelijk kunnen gelijden en dan een sluiting vormen.
IC1 en IC2 zijn de fet drivers.
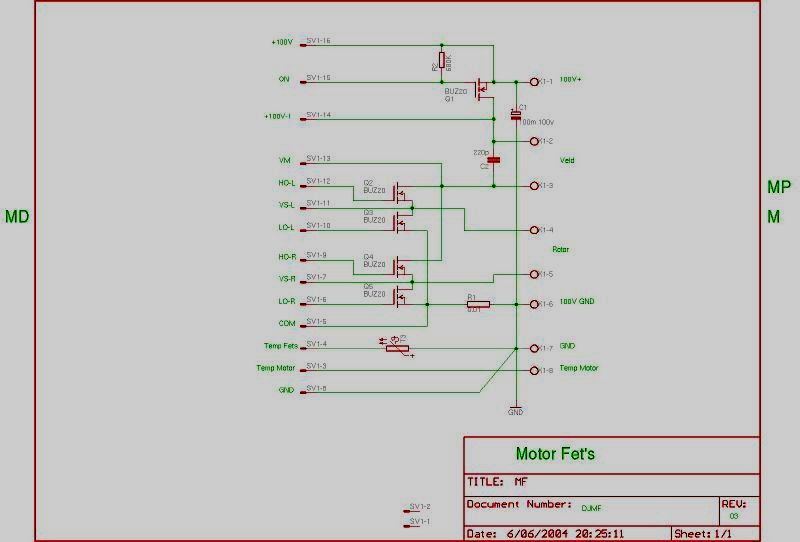
De rotor is in een brugschakeling met de fet's Q2 t/m Q5 verbonden.
Een aansluiting van de rotor hangt aan de GND en de andere wordt door het pwm signaal beurtelings
aan de + en de GND geschakelt.
Het veld staat in serie met de rotor.
De bovenste fet Q1 kan de boel uitschaken in geval van een calamiteit.
De spaningsval over R1 gaat gebruikt worden om de retour stroom te meten.
Voor de stroom meting aan de +100V kant gaat de spanningsval over de fet Q1 gebruikt worden.
Samen met "VM" SV1-13 kan de MPU tijdig een (aard)sluiting in de motor detecteren.
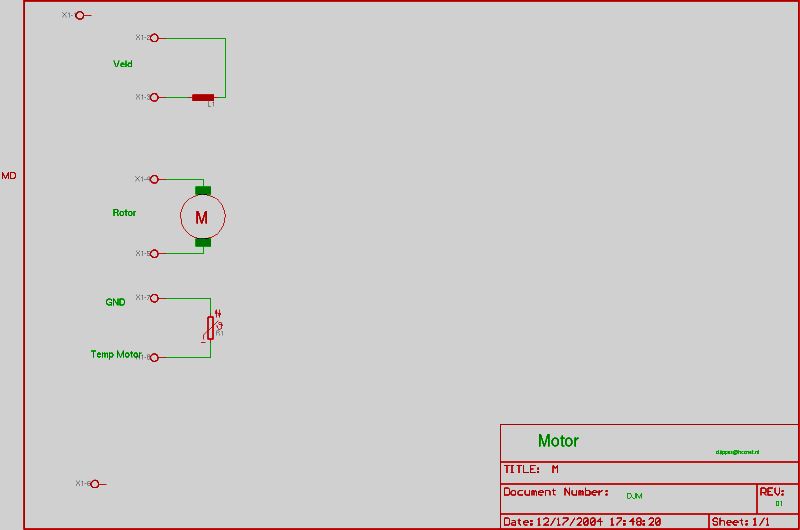
De stofzuiger motor ca 1800W.